![]() Benutzerhandbuch | EVAL-ADMT4000
Benutzerhandbuch | EVAL-ADMT4000
UG-2069
Evaluierung des ADMT4000
Leistungsfreier Multiturn-Sensor
MERKMALE
► Voll ausgestattetes Evaluierungsboard für das ADMT4000
► Magnetische Rückstellung
► PC-Steuerung mit dem Systemdemonstrationsplattform, SDP (EVALSDP-CS1Z)
► PC-Software zur Konfiguration und Datenmessung
INHALT DES EVALUATIONSKITS
► Evaluierungsboard EVAL-ADMT4000SD1Z
► Magnetischer Reiz
► Dipolmagnet
► Von Hand verschiebbare Halterung
ERFORDERLICHE HARDWARE
► Die EVAL-SDP-CS1Z oder EVAL-SDP-CB1Z Controllerboard
► USB-Kabel im Lieferumfang des EVAL-SDP-CS1Z enthalten
SOFTWARE ERFORDERLICH
► EVAL-ADMT4000SD1Z Software
ALLGEMEINE BESCHREIBUNG
Der ADMT4000 ist ein magnetischer Drehzählersensor, der Drehungen eines externen Magnetfelds ohne Leistung aufzeichnen kann. Die absolute Position, einschließlich der Anzahl der Drehungen, wird über eine serielle Peripherieschnittstelle (SPI) gemeldet. Die Evaluierungsplatine EVAL-ADMT4000SD1Z ermöglicht die Evaluierung des ADMT4000-Drehzahlsensors ohne Leistung, indem sie eine flexible Hardwareplattform mit begleitender grafischer Benutzeroberfläche (GUI) bietet. Die
EVAL-ADMT4000SD1Z bietet den ADMT4000 in einer Wellenendmagnetkonfiguration, Abbildung 1. Das Evaluierungskit besteht aus einem EVAL-ADMT4000SD1Z und einem magnetischen Stimulus auf einer Leiterplattenhalterung. Für den Betrieb mit der bereitgestellten GUI ist das EVAL-SDP-CS1Z (SDP-S) oder EVAL-SDP-CB1Z (SDP-B) erforderlich, in diesem Benutzerhandbuch austauschbar als SDP-Controller-Board bezeichnet.
 Abbildung 1. Das ADMT4000-Wellenende-Magnetauswertesystem besteht aus dem EVAL-ADMT4000SD1Z,
Abbildung 1. Das ADMT4000-Wellenende-Magnetauswertesystem besteht aus dem EVAL-ADMT4000SD1Z,
die SDP-Schnittstelle und die EVAL-ADMT4000SD1Z-GUI
BITTE SEHEN SIE DIE LETZTE SEITE FÜR EIN WICHTIGES WARNUNG UND RECHTSBEDINGUNGEN.
ERSTE SCHRITTE
SCHNELLSTARTSCHRITTE
Die Evaluierungskarte EVAL-ADMT4000SD1Z, Abbildung 2, verbindet sich entweder mit dem EVAL-SDP-CS1Z (SDP-S) or EVAL-SDP-CB1Z (SDP-B). In diesem Benutzerhandbuch bezieht sich SDP auf eine dieser Controller-Karten. Das SDP ist die Kommunikationsverbindung zwischen dem PC und dem
EVAL-ADMT4000SD1Z und SDP stellen das erforderliche SPI bereit, um den ADMT4000 zu steuern und erfasste Daten direkt an den Host-PC zu senden.
Die Evaluierungssoftware und -Treiber EVAL-ADMT4000SD1Z müssen installiert werden, bevor die Evaluierungskarte und die SDP-Controllerkarte an den USB-Anschluss des PCs angeschlossen werden, um sicherzustellen, dass das Evaluierungssystem beim Anschließen richtig erkannt wird.
Führen Sie die folgenden Schritte aus, um mit der Verwendung des EVAL-ADMT4000SD1Z zu beginnen:
- Installieren Sie die EVAL-ADMT4000SD1Z-Software. Weitere Informationen finden Sie im Abschnitt Installieren der EVAL-ADMT4000SD1Z-Software.
- Verbinden Sie den SDP mit dem EVAL-ADMT4000SD1Z.
- Schieben Sie das EVAL-ADMT4000SD1Z in die Magnethalterung. Um den Magneten richtig mit dem ADMT4000-Sensor auszurichten, stellen Sie sicher, dass das EVAL-ADMT4000SD1Z vollständig in die Magnet-Leiterplattenhalterung eingesetzt ist.
- Verbinden Sie den SDP über das mitgelieferte USB-Kabel (USB Typ A auf Mini-B) mit dem PC.
- Starten Sie die Software EVAL-ADMT4000SD1Z. Klicken Sie auf die Windows®-Taste, um das Windows-Startmenü und die Programmliste zu öffnen. Navigieren Sie zu Analog Devices und klicken Sie auf EVALADMT4000SDZ.
 Abbildung 2. Hardwarekonfiguration mit Demonstrationsmagnet
Abbildung 2. Hardwarekonfiguration mit Demonstrationsmagnet
Montage und das EVAL-ADMT4000SD1Z
BEWERTUNGSAUSSCHUSS
Das EVAL-ADMT4000SD1Z wurde entwickelt, um dem Benutzer einen schnellen Einstieg in die ADMT4000 mithilfe der mitgelieferten Auswertesoftware und SDP-Schnittstelle.
Durch Verwendung der Header auf dem EVAL-ADMT4000SD1Z, Tabelle 1, kann der Benutzer einen alternativen Mikroprozessor anschließen, um benutzerdefinierte Software zu entwickeln. Der PCB-Abschnitt, in dem der ADMT4000 montiert ist, wurde so konzipiert, dass der Benutzer die Platine in einer platzbeschränkten Umgebung montieren kann, indem er den abtrennbaren Abschnitt vom Schnittstellenabschnitt entfernt. Auf dem abtrennbaren Abschnitt sind Header vorhanden, um den Betrieb des ADMT4000 mit einem Mikroprozessor zu ermöglichen.
ADMT4000 MAGNETISCHE SENSOR
Die Position des ADMT4000-Winkelsensors in Bezug auf die Mitte des IC-Gehäuses ist im ADMT4000-Datenblatt detailliert beschrieben. Die Magnetbaugruppe richtet den mitgelieferten Magneten korrekt mit dem ADMT4000-Sensor aus, wenn die Leiterplatte vollständig in die Magnetbaugruppe eingesetzt ist. Ein diametral ausgerichteter Scheibenmagnet (Durchmesser 10 mm und Höhe 5 mm) wird mit dem Evaluierungskit EVAL-ADMT4000SD1Z geliefert. Der Magnet besteht aus Samarium (Sm)2-Kobalt (Co)17 mit einer Remanenz (Br) von 950 mT bis 1020 mT.
ADMT4000-AUSGÄNGE
Der ADMT4000 gibt Winkelpositionsdaten, Gerätestatus und Diagnosedaten über SPI aus.
STROMVERSORGUNG
Das EVAL-ADMT4000SD1Z verwendet die 3.3-V-Versorgung der SDP-Schnittstelle zur Stromversorgung aller Komponenten auf der Platine mit Ausnahme der LT3461, das über 5 V USB mit Strom versorgt wird. Der LT3461 ist ein DC/DC-Aufwärtswandler, der für die magnetische Rücksetzschaltung verwendet wird. Es ist möglich, externe Stromversorgungen zu verwenden, indem man sie über verschiedene Header anschließt, wie in Abbildung 24 und Abbildung 25 gezeigt und in Tabelle 1 beschrieben.
ADMT4000-PLATINE – ABSCHNITT ZUM ABTRETEN
Das EVAL-ADMT4000SD1Z enthält einen abtrennbaren Abschnitt. Die SDP-Schnittstellenschaltung kann entfernt werden, indem die schmalen Brücken der Evaluierungsplatine in der Mitte des EVALADMT4000SD1Z abgetrennt werden. Durch das Entfernen der SDP-Schnittstellenschaltung kann der Benutzer eine kleinere eigenständige Evaluierungsplatine verwenden. Das ADMT4000 kann an ein externes System angeschlossen werden, das die Stromversorgung liefert und die digitalen Schnittstellen steuert.
EVALUATIONS-KIT-ANSCHLÜSSE
Die PCB-Header zum Anschluss externer Systeme an das EVAL-ADMT4000SD1Z sind in Tabelle 1 aufgeführt.
Tabelle 1. Zusammenfassung der EVAL-ADMT4000SD1Z Evaluation Kit-Stiftleisten
| Kennung | Beschreibung |
| P1 | Sockel für die SDP-Schnittstellenkarte |
| P2 | Header für die Signale RSTB, CNV, BUSY und GPIO4 |
| P3 | Header für die SPI-Signale |
| P4 | Header, der den Zugriff auf I²C, SPI, Status und die Steuerung des allgemeinen Ein- und Ausgangs (GPIO) vom Breakaway-Bereich aus ermöglicht |
| P5 | Header für die magnetische Reset-Spule |
| P6 | Header für eine Differenzialspule zur Messung des Stroms in einer magnetischen Reset-Spule |
| P7 | Header für den Zugriff auf wichtige Signale im Breakaway-Bereich |
In Tabelle 2 bis Tabelle 8 sind die Verbindungen zu den auf dem EVAL-ADMT4000SD1Z verfügbaren Headern detailliert aufgeführt.
Tabelle 2. P1-Sockel für die SDP-Schnittstellen-Controller-Platine
| PIN-Nummer | Mnemonische | Beschreibung |
| 3, 4, 6, 11, 17, 23, 28, 36, 40, 46, 52, 58, 63, 69, 75, 81, 86, 93, 98, 104, 109, 115, 117, 118 |
Masse | Systemboden |
| 5 | USB_V | 5 V Versorgung über den USB-Port des angeschlossenen PCs |
| 38 | SPI CSB | SPI-Chipauswahl für ADMT4000, SDP-Chipauswahl-Port C |
| 43 | GPIO3_ACALC | GPIO- oder Winkelberechnungsstatus |
| 44 | COIL_RS | Magnetische Reset-Spule Reset aktivieren |
| 45 | GPIO0_BUSY | GPIO oder Besetztstatus-Ausgang |
| 46 | V_DE | VDD-Aktivierung für den ADMT4000 |
| 56 | EEPROM_A0 | Adresse A0 der Kartenkennung elektrisch löschbarer programmierbarer Nur-Lese-Speicher (EEPROM) |
| 74 | RSTB | ADMT4000 Reset-Funktion |
| 76 | GPIO1_CNV | GPIO oder Konvertierung starten |
| 77 | BOOST_DE | Magnetische Reset-Spule Boost-Schaltung aktivieren |
| 78 | GPIO4 | GPIO oder Fehlerstatus |
| 79 | I2C SCL_0 | I²C-Uhr |
| 80 | I2C SDA_0 | I²C-Daten |
| 82 | SPI SCLK | SPI-Uhr |
| 83 | SPI-SDO | SPI untergeordnete Datenausgabe |
| 84 | SPI SDI | SPI-Unterdaten in |
| 85 | SPI_SEL_A_N | SPI Chip Select für den GPIO Expander, SDP Chip Select A |
| 116 | 3V3 | Hauptversorgung für ADMT4000 und unterstützende Geräte |
Tabelle 3. P2-Header für das RSTB-, CNV-, BUSY- und GPIO4-Signal
| PIN-Nummer | Mnemonische | Beschreibung |
| 1 | RSTB | ADMT4000 Reset-Funktion |
| 2 | GPIO1_CNV | GPIO1 und Konvertierung starten |
| 3 | GPIO0_BUSY | GPIO0 und Busy-Status-Ausgang |
| 4 | GPIO4 | GPIO4 |
| 5 | Masse | Systemboden |
Tabelle 4. P3-Header für SPI
| PIN-Nummer | Mnemonische | Beschreibung |
| 1 | I2C-SCLK | I2C Uhr |
| 2 | SPI-SDO | SPI-Datenausgang |
| 3 | SPI SDI | SPI-Daten in |
| 4 | SPI CSB | SPI-Chipauswahl für ADMT4000, SDP-Chipauswahl-Port C |
Tabelle 5. P4-Header für externe Schnittstelle
| PIN-Nummer | Mnemonische | Beschreibung |
| 1 | 3V3 | Hauptversorgung für die ADMT4000 und unterstützende Geräte |
| 2 | Masse | Systemboden |
| 3 | 5V | Versorgung der magnetischen Rückstellspule |
| 4 | SPI SCLK | SPI-Uhr |
| 5 | SPI-SDO | SPI-Datenausgang |
| 6 | SPI SDI | SPI-Daten in |
| 7 | SPI CSB | SPI-Chip-Auswahl |
| 8 | RSTB | ADMT4000 Reset-Funktion |
| 9 | GPIO1_CNV | GPIO1 oder Konvertierung starten |
| 10 | GPIO0_BUSY | GPIO0 oder Busy-Status-Ausgang |
| 11 | GPIO4 | GPIO4 |
| 12 | GPIO5_BOOTLOAD | GPIO5 oder Bootload-Status |
| 13 | GPIO3_ACALC | GPIO3 oder Winkelberechnungsstatus |
| 14 | I2C SDA_0 | I2C-Daten |
| 15 | I2C SCL_0 | I2C Uhr |
| 16 | V_DE | VDD-Aktivierung für den ADMT4000 |
| 17 | BOOST_DE | Magnetische Reset-Spule Boost-Schaltung aktivieren |
| 18 | COIL_RS | Magnetische Reset-Spule Reset aktivieren |
Tabelle 6. P5-Header für die magnetische Reset-Spule
| PIN-Nummer | Mnemonische | Beschreibung |
| 1 | SPULE+ | Positiver Anschluss der magnetischen Rücksetzspule. |
| 2 | SPULE− | Minuspol der magnetischen Rücksetzspule. |
Tabelle 7. P6-Header für eine Differenzialspule zur Messung des Stroms in der magnetischen Reset-Spule
| PIN-Nummer | Mnemonische | Beschreibung |
| 1 | SPULE+ | High-Side-Messwiderstand Voltage |
| 2 | SPULE++ | Low-Side-Messwiderstand Voltage |
Tabelle 8. P7-Header für den Zugriff auf I²C, SPI, Status und Control GPIO vom Breakaway-Bereich aus
| PIN-Nummer | Mnemonische | Beschreibung |
| 1 | VDD | Direkte Stromversorgung des ADMT4000 |
| 2 | 5V | 5 V Versorgung für alternativen VDRIVE Pegel |
| 3 | GPIO2 | GPIO |
| 4 | I2C SCLK_I | SPI-Uhr |
| 5 | SPI SDO_I | SPI-Datenausgang |
| 6 | SPI SDI_I | SPI-Daten in |
| 7 | SPI CSB_I | SPI-Chipauswahl für den ADMT4000 |
| 8 | RSTB_I | ADMT4000 Reset-Funktion |
| 9 | CNV_I | Konvertieren starten |
| 10 | GPIO0_BUSY | GPIO oder Besetztstatus-Ausgang |
| 11 | GPIO4 | GPIO |
| 12 | GPIO5_BOOTLOAD | GPIO- oder Bootload-Status |
| 13 | GPIO3_ACALC | GPIO- oder Winkelberechnungsstatus |
| 14 | Masse | Systemboden |
| 15 | VRTAUCHEN | ADMT4000 GPIO-Versorgung |
SOFTWAREINSTALLATION
Die Abschnitte „Installieren der EVAL-ADMT4000SD1Z-Software“ und „Installieren der System Demonstration Platform Board-Treiber“ beschreiben den Softwareinstallationsprozess und gehen davon aus, dass die SDP-Treiber nicht zuvor installiert wurden.
INSTALLATION DES EVAL-ADMT4000SD1Z SOFTWARE
Um die Software EVAL-ADMT4000SD1Z zu installieren, führen Sie die folgenden Schritte aus:
- Führen Sie die Datei EVAL-ADMT4000SDZ.exe aus file geliefert auf der ADMT4000 Produktseite, um die EVAL-ADMT4000SDZ-Software zu installieren. Wenn ein Dialogfeld angezeigt wird, in dem Sie gefragt werden, ob das Programm Änderungen am PC vornehmen darf, klicken Sie auf Ja.
- Wählen Sie den Speicherort für die Installation der Software aus und klicken Sie dann auf „Weiter“ (siehe Abbildung 3).
 Abbildung 3. ADMT4000-Installationspfad
Abbildung 3. ADMT4000-Installationspfad - Anschließend wird eine Zusammenfassung der Installation angezeigt. Klicken Sie auf „Weiter“, um fortzufahren (siehe Abbildung 4).
 Abbildung 4. ADMT4000 Installationszusammenfassung
Abbildung 4. ADMT4000 Installationszusammenfassung - Klicken Sie nach Abschluss der Installation auf „Fertig“ (siehe Abbildung 5).
 Abbildung 5. ADMT4000-Installation abgeschlossen
Abbildung 5. ADMT4000-Installation abgeschlossen
INSTALLIEREN DER SYSTEM DEMONSTRATION PLATFORM BOARD-TREIBER
Nachdem die Installation der EVAL-ADMT4000SD1Z-Software abgeschlossen ist, wird ein Begrüßungsfenster (siehe Abbildung 6) zur Installation der SDP-Treiber angezeigt.
Führen Sie die folgenden Schritte aus, um die SDP-Treiber zu installieren:
- Trennen Sie die SDP-Karte vom USB-Anschluss des PCs, stellen Sie sicher, dass alle anderen Anwendungen geschlossen sind, und klicken Sie dann auf „Weiter“.
 Abbildung 6. Installation der SDP-Plattform
Abbildung 6. Installation der SDP-Plattform - Anschließend wird eine Lizenzvereinbarung angezeigt. Lesen Sie die Vereinbarung, wählen Sie „Ich akzeptiere die Lizenzvereinbarung“, klicken Sie auf „Weiter“ und dann auf „Ich stimme zu“ (siehe Abbildung 7).
 Abbildung 7. SDP-Plattformlizenz
Abbildung 7. SDP-Plattformlizenz - Anschließend wird das Fenster „Komponenten auswählen“ mit den bereits ausgewählten Standardkomponenten angezeigt. Klicken Sie auf „Weiter“ (siehe Abbildung 8).
 Abbildung 8. SDP-Komponentenauswahl
Abbildung 8. SDP-Komponentenauswahl - Wählen Sie den Speicherort für die Installation der Treiber aus und klicken Sie dann auf „Installieren“ (siehe Abbildung 9).
 Abbildung 9. Installationsordner der SDP-Plattform
Abbildung 9. Installationsordner der SDP-Plattform - Um die Installation des Treibers abzuschließen, klicken Sie auf „Schließen“. Dadurch wird der Installationsassistent geschlossen (siehe Abbildung 10).
 Abbildung 10. SDP-Installation abgeschlossen
Abbildung 10. SDP-Installation abgeschlossen - Anschließend werden die Windows-Treiber installiert. Wenn die Windows-Sicherheit um Erlaubnis zur Installation bittet, klicken Sie auf Installieren (siehe Abbildung 11).
 Abbildung 11. Installation der SDP-Treiber
Abbildung 11. Installation der SDP-Treiber
EEPROM-KONFIGURATION
Der EEPROM auf der Tochterplatine EVAL-ADMT4000SD1Z speichert den Typ der Tochterplatine und ist werkseitig eingestellt. Wenn der EEPROM nicht programmiert ist oder eine ungültige Tochterplatine angeschlossen ist, wird ein Dialogfeld wie in Abbildung 12 dargestellt angezeigt.
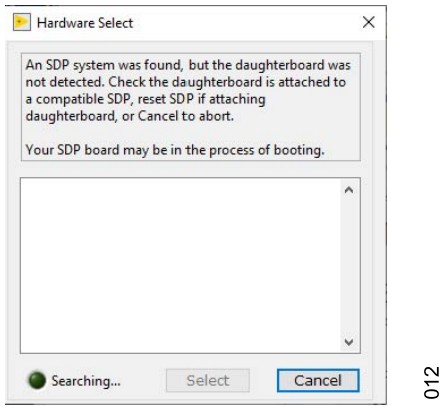 Abbildung 12. Popup-Fenster mit dem Hinweis, dass entweder eine unerwartete Tochterplatine an den SDP angeschlossen ist oder dass das EVAL-ADMT4000SD1ZEEPROM falsch programmiert wurde
Abbildung 12. Popup-Fenster mit dem Hinweis, dass entweder eine unerwartete Tochterplatine an den SDP angeschlossen ist oder dass das EVAL-ADMT4000SD1ZEEPROM falsch programmiert wurde
Um das EEPRPOM zu konfigurieren, starten Sie das Dienstprogramm SDP EEPROM Programmer (.NET), das verfügbar ist unter Analoge Geräte, Inc., Vertrieb.
Die entsprechende .dat file ist auf Anfrage auch verfügbar, um die Last zu konfigurieren File Registerkarte, wie in Abbildung 13 gezeigt, die Adresse 54 verwendet.
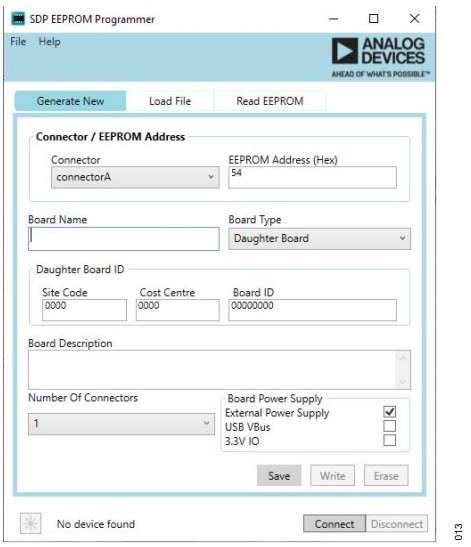 Abbildung 13. SDP EEPROM-Konfigurationsprogramm
Abbildung 13. SDP EEPROM-Konfigurationsprogramm
EVAL-ADMT4000SD1Z SOFTWAREBETRIEB
Das Overview der ADMT4000-Evaluierungs-GUI und der Abschnitte „Starten der EVAL-ADMT4000SD1Z-Software“ beschreiben die Bedienung der in der EVAL-ADMT4000SD1Z-Software bereitgestellten GUI.
STARTEN DES EVAL-ADMT4000SD1Z SOFTWARE
Nachdem Sie die Schritte im Abschnitt „Softwareinstallation“ abgeschlossen haben, starten Sie die Software EVAL-ADMT4000SD1Z wie folgt:
► Verbinden Sie den SDP mit dem EVAL-ADMT4000SD1Z über das mitgelieferte USB-Kabel mit dem PC.
► Klicken Sie auf das Windows-Symbol, um das Windows-Startmenü und die Programmliste zu öffnen. Wählen Sie Analog Devices/EVAL-ADMT4000SD1Z.
► Wenn die ADMT4000 Evaluation GUI erfolgreich installiert und das EVAL-ADMT4000SD1Z erkannt wurde, öffnet sich automatisch die Evaluierungssoftware EVALADMT4000SD1Z (siehe Abbildung 14). Der Name der Evaluierungsplatine wird auf der Vorderseite der GUI angezeigt (siehe Beschriftung 1 in Abbildung 14).
 Abbildung 14. ADMT4000 Evaluation GUI mit Anzeige der verbundenen
Abbildung 14. ADMT4000 Evaluation GUI mit Anzeige der verbundenen
EVALADMT4000SD1Z Evaluierungskit
► Wenn das Evaluierungssystem EVAL-ADMT4000SD1Z nicht über das SDP mit dem USB-Port verbunden ist, wird der Name der Evaluierungsplatine nicht auf der Vorderseite angezeigt. Nach einigen Sekunden erscheint das Fenster „Hardwareauswahl“ (siehe Abbildung 15). Schließen Sie das Evaluierungssystem EVAL-ADMT4000SD1Z an den USB-Port des PCs an und warten Sie einige Sekunden. Das Fenster „Hardwareauswahl“ zeigt dann die mit dem PC verbundenen SDP-Evaluierungskits an. Wählen Sie das EVAL-ADMT4000SD1Z aus und klicken Sie auf „Auswählen“ (siehe Abbildung 16).
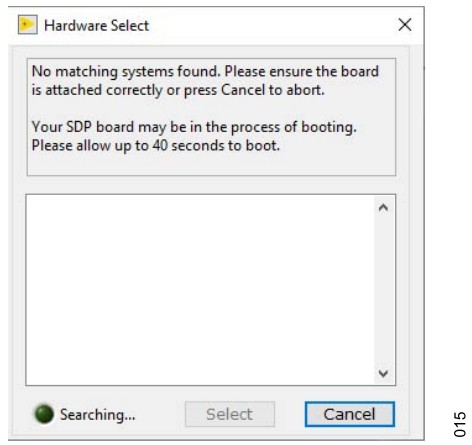 Abbildung 15. Hardware-Auswahlfenster, das beim Starten der GUI angezeigt wird
Abbildung 15. Hardware-Auswahlfenster, das beim Starten der GUI angezeigt wird
Ohne das an den PC angeschlossene EVAL-ADMT4000SD1Z
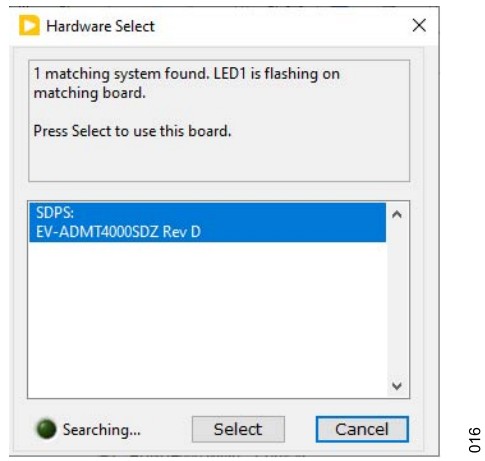 Abbildung 16. Hardware-Auswahlfenster, das angezeigt wird, wenn der
Abbildung 16. Hardware-Auswahlfenster, das angezeigt wird, wenn der
EVALADMT4000SD1Z Verbindung zum PC
► Beim Start beginnt die ADMT4000 Evaluation GUI automatisch mit der Erfassung und Anzeige von Daten aus dem ADMT4000. Die anfänglichen Sequenzeinstellungen werden in der mitgelieferten Konfiguration definiert file C:\Programm Files\Analog Devices\EVAL-ADMT4000SDZ 0.0.0\dataADMT4000 Config.csv. Um die GUI in einer benutzerdefinierten Konfiguration zu starten, muss der Benutzer die Konfiguration ändern file.
ÜBERVIEW DER ADMT4000-BEWERTUNG Benutzeroberfläche
Die ADMT4000-Evaluierungs-GUI bietet eine Reihe von Registerkarten, mit denen der Benutzer die Funktionen des ADMT4000 evaluieren kann. Die GUI-Registerkarten sind in Abbildung 17 dargestellt und beschriftet. Tabelle 9 beschreibt die wichtigsten Funktionen, auf die über die Registerkarten zugegriffen werden kann.
 Abbildung 17. GUI-Registerkartenmenü
Abbildung 17. GUI-Registerkartenmenü
Tabelle 9. Beschreibungen der ADMT4000 Evaluation GUI-Registerkarten mit Beschriftungen
| Etikett Nummer | Registerkartenname | Beschreibung |
| 1 | Datenerfassung | Die Registerkarte Datenerfassung ist die primäre Benutzerregisterkarte zur Überwachung der Ausgabe des ADMT4000 und zum Konfigurieren der Erfassungssequenz. |
| 2 | Dienstprogramm | Die Registerkarte Utility zeigt die Details des FAULT-Registerstatus an und ermöglicht den Upload der Benutzerkonfiguration und Protokollierung von SPI-Befehlen. |
| 3 | Kalibrierung | Auf der Registerkarte „Kalibrierung“ konfiguriert der Benutzer die Kalibrierung auf Systemebene. |
Registerkarte „Datenerfassung“
Die Registerkarte „Datenerfassung“ (siehe Abbildung 18) zeigt Sensormessungen an und ermöglicht den Zugriff auf die Sensordiagnose.
 Abbildung 18. Registerkarte „Datenerfassung“
Abbildung 18. Registerkarte „Datenerfassung“
Tabelle 10 enthält eine Beschreibung der Beschriftungen auf der Registerkarte „Datenerfassung“, Abbildung 18.
Tabelle 10. Beschreibungen der Registerkartenbeschriftungen für die Datenerfassung
| Etikett Nummer | Bezeichnungsname | Beschreibung |
| 1 | Ablaufsteuerung | Bedienelemente zur Auswahl der Messsequenzeinstellungen. |
| 2 | Starten oder pausieren | Startet die konfigurierte Sequenz oder pausiert die aktuelle Sequenz. |
| 3 | Zurücksetzen | Führt einen magnetischen Reset mit der im Evaluierungskit integrierten Spule durch. |
| 4 | Sinus und Cosinus | Stellt den Sinus-Ausgang im Vergleich zum Cosinus-Ausgang dar. |
| 5 | Datenprotokoll | Ermöglicht die Datenaufzeichnung der samples. |
| 6 | Temperatur (°C) | Ist die Anzeige des internen Temperatursensors |
| 7 | Aktuelle Messung | Zeigt den neuesten Winkel, die Anzahl der Drehungen und den SPI-Frame-Zähler an. Die Geräteidentifikation wird nur beim Start aktualisiert. |
| 8 | Erfasste Daten | Grundstücksfläche für die sampLED-Daten. Zeigt die Anzahl der Drehungen, den Winkel und die verfügbaren Diagnosewerte an. |
| 9 | Länge anzeigen | Steuert die Anzahl der im Diagramm „Erfasste Daten“ angezeigten Datenpunkte. |
| 10 | Leistung | . Steuert die Stromversorgung des ADMT4000. |
| 11 | Stoppen | Beendet die GUI |
| 12 | Gerätestatus | Anzeigen, die rot werden, wenn ein Fehlerflag auf einem SPI-Frame erkannt wird (bei industriellen Anwendungen nicht aktiv), ein zyklischer Redundanzprüffehler (CRC) auf einem SPI-Frame erkannt wird oder ein Fehlerflag im FAULT-Register gesetzt wird. |
| 13 | Hilfesymbol (?) | Ein ExampDatei der Hilfesymbole, die dem Benutzer zusätzliche Informationen bieten. |
Ablaufsteuerung
Der Sequenzsteuerungsbereich auf der Registerkarte „Datenerfassung“ ermöglicht dem Benutzer, den Erfassungsmodus des ADMT4000 wie folgt zu konfigurieren:
► Wählen Sie im Dropdown-Menü „Konvertierungstyp“ entweder „KONTINUIERLICHE“ oder „EINMALIGE“ Erfassungen aus.
► Wählen Sie im Dropdown-Menü „CNV-Quelle“ entweder den softwaregenerierten Konvertierungsstart oder ein extern generiertes CNV. Das externe CNV-Signal wird von der SDP-Controller-Karte generiert.
► Im Dropdown-Menü „Synchronisierung konvertieren“ ist die Verwendung einer externen Quelle zum Synchronisieren von Winkelmessungen möglich.
► Aktivieren oder deaktivieren Sie im Dropdown-Menü „Winkelfilter“ den Winkelfilter mit unendlicher Impulsantwort (IIR).
► Wählen Sie im Dropdown-Menü „8. Harmonische“ zwischen dem werkseitig eingestellten Koeffizienten der 8. Harmonischen oder einem benutzerdefinierten Wertkoeffizienten in der ADMT4000 Config.csv-Konfiguration. file.
EVAL-ADMT4000SD1Z SOFTWAREBETRIEB
Start
Mit der Schaltfläche „Start“ können Sie eine Messsequenz starten oder anhalten. Beachten Sie, dass sich die Beschriftung der Schaltfläche „Start“ in „Pause“ ändert, sobald eine Erfassung läuft.
Zurücksetzen
Die RESET-Taste leitet einen magnetischen Reset des Umdrehungszählersensors mithilfe der Spule auf dem EVAL-ADMT4000SD1Z wie folgt ein:
► Starten Sie eine Konvertierungssequenz.
► Klicken Sie auf Zurücksetzen.
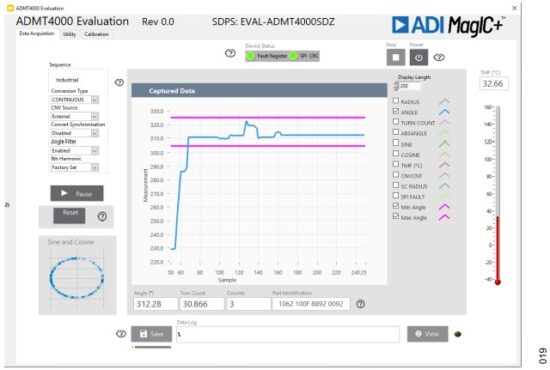 Abbildung 19. Anzeige der erfassten Daten mit dem erfassten Winkel (Blau) und dem Ziel-Maximal- und Minimalwinkel (Magenta) für den magnetischen Reset
Abbildung 19. Anzeige der erfassten Daten mit dem erfassten Winkel (Blau) und dem Ziel-Maximal- und Minimalwinkel (Magenta) für den magnetischen Reset
► Die Anzeige „Erfasste Daten“ zeigt dann die WINKEL-Messung und ein Min.-Winkel- und ein Max.-Winkel-Ziel an (siehe Abbildung 19).
► Drehen Sie den Magneten, bis der WINKEL-Messwert innerhalb der in Abbildung 19 gezeigten Grenzen liegt.
► Klicken Sie auf „Zurücksetzen“, Bezeichnung 3 in Abbildung 18.
► Beim Betrieb im Konvertierungstyp „ONE SHOT“ zeigt die Turn Count-Anzeige einen Wert nahe 46 an. Beachten Sie, dass der genaue Wert vom genauen Winkel des Magneten abhängt.
► Beim Betrieb im Konvertierungstyp „KONTINUIERLICH“ muss der Benutzer die Konvertierungssequenz neu starten, um die zurückgesetzte Umdrehungszahl zu beobachten.
► Drehen Sie den Magneten gegen den Uhrzeigersinn, um zu beobachten, wie die Umdrehungszahl abnimmt.
Sinus und Cosinus
In diesem Bereich wird die Größe der Sinus- und Cosinusmessungen angezeigt.
Datenprotokoll
Der Bereich Datenprotokoll (Abbildung 20) ermöglicht dem Benutzer das Speichern der erfassten Daten in einem NI-TDMS-Protokoll. file wie folgt:
 Abbildung 20. Bereich „Erfasstes Datenprotokoll“ der Registerkarte „Datenerfassung“
Abbildung 20. Bereich „Erfasstes Datenprotokoll“ der Registerkarte „Datenerfassung“
► Die Speicherfunktion kann vor oder während einer Erfassungssequenz gestartet werden. Beachten Sie, dass keine Daten gespeichert werden, die von der GUI erfasst wurden, bevor die Speicherfunktion aktiviert wurde.
► Klicken Sie auf Speichern (Bezeichnung 1 in Abbildung 20). Ein Fenster wird angezeigt. Der Benutzer kann die file Name und Speicherort in diesem Fenster. Stellen Sie sicher, dass die file Die Erweiterung lautet .tdms.
► Die file Der Pfad für die protokollierten Daten wird im Datenprotokoll-Indikator (Bezeichnung 2 in Abbildung 20) angezeigt und der Indikator „Speichern aktiv“ (Bezeichnung 3 in Abbildung 20) wechselt von Dunkelgrün zu Hellgrün.
► Um die Speicherfunktion abzubrechen, klicken Sie auf Speichern (Beschriftung 1 in Abbildung 20).
► Die Anzeige „Speichern aktiv“ (Beschriftung 3 in Abbildung 20) wechselt dann von hellgrün auf dunkelgrün.
► Zur Optimierung des TDMS filedefragmentiert die GUI automatisch die file, und der Fortschritt dieses Defragmentierungsvorgangs wird im Fortschrittsbalken angezeigt (siehe Beschriftung 4 in Abbildung 20).
► Zum Öffnen der file Standort, klicken Sie auf VIEW (Bezeichnung 5 in Abbildung 20).
Das TDMS file können mithilfe eines kostenlosen NI TDM Excel Add-Ins für Microsoft Excel in Excel importiert werden, das von der NI-Website heruntergeladen werden kann. webSeite. Das Protokoll file speichert bei jeder Erfassung die Gerätekonfiguration, Messdaten und den Fehlerstatus.
Temperatursensor
Die Sperrschichttemperatur wird sowohl als Thermometeranzeige als auch als Digitalanzeige angegeben.
Neueste Messung
Die letzten Winkel- und Drehungszähldaten werden im Bereich „Neueste Messung“ der Registerkarte „Datenerfassung“ angezeigt (Bezeichnung 7 in Abbildung 18).
► Die Winkelanzeige zeigt die WINKEL-Daten in Grad an.
► Die Turn Count-Anzeige zeigt die Anzahl der Runden an.
► Die Zähleranzeige zeigt die Anzahl der SPI-Frames.
► Die Teileidentifikationsanzeige zeigt die eindeutige Kennung des an das EVAL-ADMT4000SD1Z angeschlossenen Geräts.
Erfasste Daten
Der Abschnitt Erfasste Daten (Beschriftung 8 in Abbildung 18) zeigt einen Verlauf der Datenerfassungen an. Die Kontrollkästchen in der Diagrammlegende können die Sichtbarkeit von Datenelementen im Diagramm steuern. Beachten Sie, dass die protokollierten Daten alle in der Diagrammlegende angezeigten Daten enthalten, unabhängig davon
der Status des Kontrollkästchens neben dem Plotnamen.
Länge anzeigen
Mit der Steuerung „Anzeigelänge“ (Bezeichnung 9 in Abbildung 18) können Sie die Anzahl der im Diagramm „Erfasste Daten“ angezeigten Datenpunkte steuern.
Leistung
Klicken Sie auf Power (Bezeichnung 10 in Abbildung 18), um den Energiesparmodus des ADMT4000.
 Abbildung 21. Netzschalter
Abbildung 21. Netzschalter
Die GUI versucht, vom ADMT4000 zu lesen, unabhängig von seinem Energiezustand.
Stoppen
Klicken Sie auf „Stopp“ (Bezeichnung 11 in Abbildung 18), um anzuhalten und die GUI zu beenden.
Gerätestatus
Die folgenden drei Fehlerstatusanzeigen (Bezeichnung 13 in Abbildung 18) im Bereich „Gerätestatus“ zeigen den Fehlerstatus des letzten SPI-Frames an:
► Fehlerregister zeigt an, dass im Fehlerregister ein Flag gesetzt ist.
► SPI CRC zeigt an, ob ein SPI-Frame-CRC-Fehler erkannt wurde.
► SPI-Flag ist das Fehlerflag, das im ADMT4000-SPI-Frame enthalten ist und anzeigt, dass im FAULT-Register des ADMT4000 ein Flag gesetzt ist.
Helfen
Es gibt mehrere Hilfe-Schaltflächen, die über die ADMT4000 Evaluation-GUI verteilt sind, z. B.ample, siehe Beschriftung 13 in Abbildung 18. Hilfefunktionen wie diese sind dazu gedacht, den Benutzer bei ausgewählten Funktionen zu unterstützen.
Registerkarte „Dienstprogramm“
Über die Registerkarte „Utility“ (siehe Abbildung 22) haben Sie Zugriff auf das FAULT-Register und können die GPIOs des ADMT4000 sowie andere Ressourcen steuern, die in den folgenden Abschnitten beschrieben werden.
 Abbildung 22. Registerkarte „Dienstprogramm“
Abbildung 22. Registerkarte „Dienstprogramm“
Tabelle 11 enthält eine Beschreibung der Beschriftungen auf der Registerkarte „Dienstprogramm“ (siehe Abbildung 22).
Tabelle 11. Beschreibungen der Registerkartenbezeichnungen für Dienstprogramme
| Etikettennummer | Bezeichnungsname | Beschreibung |
| 1 | Befehlsprotokoll | Protokolliert die von der GUI generierten SPI-Befehle |
| 2 | DIGIO Funktionen | Ermöglicht die Steuerung der GPIO-Port-Funktionen |
| 3 | GPIO-Monitor | Aktueller GPIO-Status |
| 4 | FAULT-Register | FAULT-Registerstatus |
| 5 | SPI-Taktfrequenz (Hz) | SPI-Taktfrequenzsteuerung |
| 6 | Benutzerkonfiguration | Benutzerkonfigurationssteuerung |
Befehlsprotokoll
Das Befehlsprotokoll (Beschriftung 1 in Abbildung 22) kann die von der GUI ausgegebenen SPI-Befehle zur Steuerung des ADMT4000 erfassen. Um diese Funktion zu aktivieren, aktivieren Sie das Kontrollkästchen Aufzeichnung aktivieren. Klicken Sie auf SPEICHERN, um das Protokoll zu speichern, und klicken Sie auf das Papierkorbsymbol, um das Protokoll zu löschen.
DIGIO-Funktion
Die GPIO-Ports auf dem ADMT4000 kann mit der DIG-IO-Funktionssteuerung (Beschriftung 2 in Abbildung 22) konfiguriert werden. Wenn die ADMT4000-Evaluierungs-GUI gestartet wird, werden die GPIO-Ports entsprechend der ADMT4000-Konfiguration in der Datei Config.csv hochgefahren. file. Beachten Sie, dass Sie die Funktionen im Dropdown-Menü „Port“ auswählen können, um die Funktionsweise dieser Ports zu ändern.
GPIO-Monitor
Der GPIO-Monitor (Beschriftung 3 in Abbildung 22) zeigt den aktuellen Logikpegel der GPIO-Ports an. Hellgrün zeigt einen hohen Zustand am Port an, und dunkelgrün zeigt einen niedrigen Zustand an.
FAULT-Register
Das FAULT-Register (Beschriftung 4 in Abbildung 22) zeigt den neuesten Status des FAULT-Registers des ADMT4000 an. Hellrot bedeutet, dass das FAULT-Flag gesetzt ist, und Dunkelrot bedeutet, dass ein Fehler erkannt wurde. In Abbildung 22 zeigt das FAULT-Register an, dass keine Fehler erkannt wurden.
SPI-Taktfrequenz (Hz)
Um den SDP-SPI-Takt zu ändern, aktualisieren Sie das Feld „SPI-Taktfrequenz (Hz)“ (Bezeichnung 5 in Abbildung 22).
Benutzerkonfiguration
So laden Sie eine Konfiguration hoch file Sie können jederzeit zum Bereich „Benutzerkonfiguration“ der Registerkarte „Dienstprogramm“ (Bezeichnung 6 in Abbildung 22) gehen und Folgendes tun:
► Wählen Sie die gewünschte Benutzerkonfiguration file.
► Klicken Sie auf „Hochladen“.
► Nach der Konfiguration file Uploads wird der ADMT4000 neu konfiguriert. Beachten Sie, dass das Fenster „Read Reg Report“ den Status der Benutzerregister nach einer Neukonfiguration anzeigt.
Konfiguration File
Die Konfiguration file für EVAL-ADMT4000SD1Z enthält die Starteinstellungen der ADMT4000 Evaluation GUI, die den ADMT4000 beim Start der Anwendung in einen benutzerdefinierten Zustand versetzen. Die Registernamen können nicht geändert werden; der Benutzer kann jedoch die Registereinstellungen ändern, die dem Registernamen folgen. Die file muss im durch Kommas getrennten *.csv-Format gespeichert werden.
Der Inhalt der mitgelieferten Konfiguration file (ADMT4000 Config.csv) enthält den folgenden Inhalt:

Registerkarte „Kalibrierung“
Über die Registerkarte „Kalibrierung“ kann der Benutzer auf die Kalibrierungsfunktionen des ADMT4000 zugreifen. Um eine Kalibrierung durchzuführen, muss der ADMT4000 in einem System konfiguriert werden, das einen Motor mit einem Wellenendmagneten enthält, der nicht im Evaluierungskit enthalten ist. Der ADMT4000-Sensor muss genau auf die Mitte der Motorwelle und die Mitte des Magneten ausgerichtet sein.
Der Kalibrierungsprozess in der GUI besteht aus den folgenden Schritten:
- Aktivieren Sie den Motor mit konstanter Geschwindigkeit.
- Sammeln Sie Kalibrierungs-ample Daten.
- Generieren Sie die Kalibrierungskoeffizienten.
- Testen Sie die Winkelleistung mit den Kalibrierungskoeffizienten.
- Konfigurieren Sie den ADMT4000 mit den generierten Kalibrierungskoeffizienten.
Die Kalibrierungskoeffizienten bestehen aus Systemkorrekturen für die 1., 2., 3. und 8. Harmonische des sampLED-Daten. Harmonische Fehler werden durch Systemtoleranzen verursacht, einschließlich der Verschiebung der X- und Y-Achse zwischen Sensor und Magnet.
Der Benutzer kann das Ergebnis der Kalibrierung überprüfen und den ADMT4000 mit den generierten Koeffizienten neu konfigurieren.
 Abbildung 23. Registerkarte „Kalibrierung“
Abbildung 23. Registerkarte „Kalibrierung“
Die Registerkarte „Kalibrierung“ ist in Abbildung 23 dargestellt. Tabelle 12 enthält eine Beschreibung der Beschriftungen auf der Registerkarte „Kalibrierung“ (siehe Abbildung 23).
Tabelle 12. Beschreibungen der Registerkartenbeschriftungen für die Kalibrierung
| Etikettennummer | Bezeichnungsname | Beschreibung |
| 1 | Kalibrierungsdatenquelle | Steuert die Quelle der Kalibrierungsdaten |
| 2 | Sample-Steuerung | Steuert die externe Motordrehzahl, die Anzahl der Umdrehungen des Motors, die Gesamtzahl der Samples zu erwerben, Samples pro Rotation und SampFrequenz (Hz) |
| 3 | In-Reichweite-Anzeige | Wechselt von dunkelgrün zu hellgrün, wenn ein gültiger sampDateikonfiguration ist ausgewählt |
| 4 | Start | Startet die Kalibrierungsroutine |
| 5 | Kalibrierung Samples | Diagramm der sampDaten zur Berechnung der Koeffizienten |
| 6 | PreCal Winkelfehlerdiagramm | Plotbereich für die Vorkalibrierungsdaten und Anzeige der Systemwinkelfehler im Frequenzbereich und Zeitbereich |
| 7 | PostCal Winkelfehlerdiagramm | Plotbereich für die Daten nach der Kalibrierung und Anzeige der Winkelfehler des Systems entweder im Zeitbereich oder im Frequenzbereich. |
| 8 | Kalkulierte Kalibrierung | Zeigt die Kalibrierungskoeffizienten der letzten Kalibrierungsroutineberechnungen an |
| 9 | Kal.-Daten | Klicken Sie auf Cal Data, um die s zu speichernampDateidaten in eine file |
| 10 | Konfiguration | Klicken Sie auf Konfigurieren, um den ADMT4000 mit den neuesten Kalibrierungskoeffizienten neu zu konfigurieren |
Kalibrierungsdatenquelle
Um eine Benutzerkalibrierung durchzuführen, muss das EVAL-ADMT4000SD1Z mit einem Motor konfiguriert und die Steuerung der Kalibrierungsdatenquelle auf ADMT4000 eingestellt werden.
Die folgenden zwei zusätzlichen Betriebsmodi für die Kalibrierungsroutine sind verfügbar und können in den Steuerelementen der Kalibrierungsdatenquelle ausgewählt werden:
► Mit benutzerdefinierten harmonischen Koeffizienten kann der Benutzer benutzerdefinierte Koeffizienten eingeben (siehe Abschnitt „Berechnete Kalibrierung“) und die resultierenden Fehler beobachten. Für diese Funktion ist jedoch ein Motor erforderlich.
► Beispielample Data stellt einen typischen Datensatz dar. Die schnelle Fourier-Transformation (FFT) und die berechneten Kalibrierungskoeffizienten werden in der ADMT4000-Auswertungs-GUI angezeigt. Beachten Sie, dass in diesem Fall die Nachkalibrierung nicht angezeigt werden kann.
Sample Steuerung
Konfigurieren Sie dieampDer Bedienbereich wird bei der GUI-Steuerung mit einem Motor wie folgt angezeigt:
► Die Drehzahl des externen Motors ist die Geschwindigkeit des externen Motors.
► „Anzahl der Rotationen“ ist die Anzahl der Rotationen, die zum Erfassen der Winkeldaten vom ADMT4000 verwendet werden.
►SampDie zu erwerbenden Dateien sind die Gesamtzahl derampDateien zum Erwerben.
►Samples per Rotation ist die Gesamtzahl der sampLes pro Umdrehung.
►Sample Freq (Hz) ist die sample-Frequenz in Hz.
Es wird empfohlen, für die Kalibrierung 11 magnetische Rotationen durchzuführen. Die Gesamtzahl der sampDie Anzahl der über die 11 Rotationen erfassten Dateien muss eine Potenz von 2 sein, um eine kohärente FFT zu gewährleisten. Die empfohlene Mindestgesamtzahl vonamples ist 2¹⁰ (1024) über die 11 Umdrehungen. Es ist wichtig zu beachten, dass sich der Magnet während des Kalibrierungsvorgangs mit konstanter Geschwindigkeit drehen muss. Andernfalls addiert sich der Motordrehzahlfehler zum Winkelfehler.
Die Anzeige „In Reichweite“ (Beschriftung 3 in Abbildung 23) wechselt von dunkelgrün auf hellgrün, wenn ein gültiger sampDateikonfiguration ist ausgewählt.
Start
Klicken Sie auf „Start“, um den Kalibrierungsvorgang zu starten. Stellen Sie vor dem Klicken auf „Start“ sicher, dass der externe Motor einen stabilen Zustand erreicht hat, bevor Sie mit dem Kalibrierungsvorgang beginnen.
Kalibrierung Samples
Die Kalibrierung SampDas Dateidiagramm zeigt den erfassten Sinus und Cosinus in ADC-Codes und den aus Sinus und Cosinus berechneten Winkel.
PreCal Winkelfehlerdiagramm
Der PreCal Winkelfehlergraph zeigt die FFT der erfassten Daten oder die FFT der im Beispiel bereitgestellten Daten an.ample daten file.
PostCal Winkelfehlerdiagramm
Das PostCal-Winkelfehlerdiagramm zeigt die FFT des ADMT4000 mit den konfigurierten berechneten Koeffizienten an.
Berechnete Kalibrierung
Der Bereich „Berechnete Kalibrierung“ verfügt über eine Registerkarte, die es dem Benutzer ermöglicht, die berechneten Koeffizienten entweder in Grad oder im HEX-Code anzuzeigen, der zum Konfigurieren der ADMT4000-Kalibrierungskoeffizientenregister verwendet wird.
Wenn Benutzerharmonische Koeffizienten im Kontrollbereich Kalibrierungsdatenquelle ausgewählt ist, kann der Benutzer Werte in die Registerkarte HEX-Code des Bereichs Berechnete Kalibrierung eingeben. Wenn die Kalibrierung in diesem Modus ausgeführt wird, wird der resultierende Winkelfehler mit dem Benutzer angezeigt
Koeffizienten.
Kal.-Daten
Klicken Sie nach einer Kalibrierungsroutine auf „Kalibrierungsdaten“, um die erfassten Daten zu speichern.
Konfiguration
Klicken Sie auf „Konfigurieren“, um ADMT4000 mit den Kalibrierungskoeffizienten zu aktualisieren, die im Kontrollbereich „Berechnete Kalibrierung“ eingegeben wurden.
SCHALTPLÄNE UND PLATTENABMESSUNGEN
Die PCB-Schaltpläne für das EVAL-ADMT4000SD1Z sind in Abbildung 24 und Abbildung 25 dargestellt. Die PCB-Abmessungen sind in Abbildung 26 dargestellt. Die Position des AMR-Sensors muss so nah wie möglich an der Mitte der Drehachse liegen.
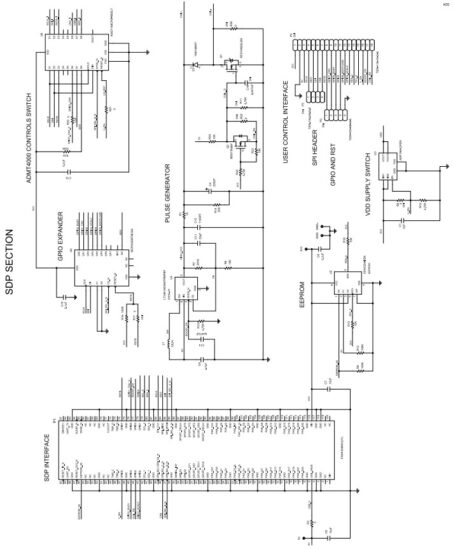 Abbildung 24. Schema des SDP-Schnittstellenabschnitts EVAL-ADMT4000SD1Z
Abbildung 24. Schema des SDP-Schnittstellenabschnitts EVAL-ADMT4000SD1Z Abbildung 25. EVAL-ADMT4000SD1Z, Schema des Platinenabbruchabschnitts
Abbildung 25. EVAL-ADMT4000SD1Z, Schema des Platinenabbruchabschnitts Abbildung 26. Abmessungen EVAL-ADMT4000SD1Z, Einheiten sind Millimeter [Zoll]
Abbildung 26. Abmessungen EVAL-ADMT4000SD1Z, Einheiten sind Millimeter [Zoll]
Einzelheiten zur Sensorposition im Gehäuse finden Sie im Datenblatt des ADMT4000. Unter Bezugnahme auf die Etikettennummern in Abbildung 26 zeigt Etikett 1 die SDP-Montagelöcher.
Die Größen der Montagelöcher sind in Abbildung 26 und Tabelle 13 dargestellt.
Tabelle 13. Abmessungen der Montagelöcher für EVAL-ADMT4000SD1Z
| Symbol | Durchmesser in mm | Überzug |
| A | 2.2 | Nicht plattiert |
| B | 3.175 | Nicht plattiert |
| C | 3.2 | Nicht plattiert |
BESTELLINFORMATIONEN
STÜCKLISTE
Tabelle 14. Stückliste
| Komponente | Beschreibung | Hersteller | Teilenummer |
| 1. und 2. Jahrhundert | 1 µF Keramikkondensatoren, 10 V, 5%, X8L, 0805, AEC-Q200 | Kemet | C0805C105J8NACAUTO |
| C3, C8, C13 | 0.1 µF Keramikkondensatoren, 35 V, 10%, X7R, 0402, AEC-Q200 | TDK | CGA2B3X7R1V104K050BB |
| C4 | NIEDRIGER ESR | Vishay | MAL216099103E3 |
| 220 µF Aluminium-Elektrolytkondensator, 50 V, 20%, 12.5 mm | |||
| × 16 mm, AEC-Q200, 550 mA | |||
| 5. und 7. Jahrhundert | 10 µF Keramikkondensatoren, 6.3 V, 20%, X7R, 0603 | Samsung | CL10B106MQ8NRNC |
| C6, C10, C15, C18, C19 | 0.1 µF Keramikkondensatoren, 50 V, 10%, X8R, 0603, AEC-Q200 | TDK | CGA3E3X8R1H104K080AB |
| C9 | 4.7 µF Keramikkondensator, 16 V, 5%, X7R, 0805, AEC-Q200 | Kemet | C0805X475J4RACAUTO |
| C11 | 22 pF Keramikkondensator, 100 V, 5%, C0G, 0603, AEC-Q200 | TDK | CGA3E2NP02A220J080AA |
| C12 | 1100 pF Keramikkondensator, 50 V, 1%, X8G, 0603, AEC-Q200 | Murata | GCM1885G1H112FA16D |
| C14 | 0.047 µF Keramikkondensator, 25 V, 10%, X8R, 0402, AEC-Q200, Soft-Termination | TDK | CGA2B1X8R1E473K050BE |
| C16 | 0.047 µF Keramikkondensator, 0.047 µF, 25 V, 10% X8R, 0402, AEC-Q200 |
TDK | CGA2B1X8R1E473K050BE |
| C17 | 2 pF Keramikkondensator, 25 V, 0.1 pF, C0G, 0402 | AXV | 04023U2R0BAT2A |
| D1 | Diode, hohe Leitfähigkeit, schnelles Schalten | Fairchild Semiconductor | 1N914BWT |
| DS1, DS2 | Dioden, hyperhell, niedriger Stromverbrauch, Leuchtdiode (LED), grün | Osram Opto Semiconductors | LGL29K-G2J1-24-Z |
| L1 | Induktor, drahtgewickelt, 15 μH, 10%, 2.52 MHz, 0.6 A, 0.5 Ω, 1812, AEC-Q200 | TDK | B82432T1153K000 |
| P1 | 120-polige Platine-zu-Platine-Steckverbinderbuchse, 0.6 mm Rastermaß | HR | FX8-120S-SV(21) |
| P3 | 4-poliger PCB-Stiftleistenstreifen, 0.100″ Rastermaß | Samtec | TSW-104-08-GS |
| P2 | 5-poliger PCB-Stiftleistenstreifen, 0.100″ Rastermaß | Samtec | TSW-105-08-GS |
| P4 | 18-poliger PCB-Stiftleistenstreifen, 0.100″ Rastermaß | Samtec | TSW-118-16-GS |
| P5, P6 | 2-Positionen-Leiterplatten-Stiftleisten, 0.100″ Rastermaß | AmpHenol | 9157-102HLF |
| P7 | 15-poliger PCB-Header, rechtwinklig, 0.100″ Rastermaß | Molex | 53048-1510 |
| Q1 | N-Kanal-MOSFET, 14 A, 50 V, 3-poliger DPAK | Onsemi | RFD14N05LSM |
| Q2 | N-Kanal-MOSFET, 200 mA, 50 V, 3-Pin SOT-23 | Diodes Incorporated | BSS138-7-F |
| R1 | 1 kΩ SMD-Widerstand, 1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERJ-6ENF1001V |
| R2 | 0.005 Ω SMD-Widerstand, 1%, 2 W, 2512, breiter Anschluss | Ohmit | LVK25R005FER |
| R3, R6, R17, R20, R21, R25, | 0 Ω SMD-Widerstände, Jumper, 1/10 W, 0402, AEC-Q200 | Panasonic | ERJ-2GE0R00X |
| R26 bis R28, R31, R4, R9, R12, R16, R19, R29, R30, R34 bis R37, R40 bis R42 | 100 kΩ SMD-Widerstände, 5%, 1/10 W, 0402, AEC-Q200 | Panasonic | ERJ-2GEJ104X |
| R5, R33 | 1.5 kΩ SMD-Widerstände, 1%, 1/10 W, 0603, AEC-Q200 | Panasonic | ERJ-3EKF1501V |
| R7 | 261 kΩ SMD-Widerstand, 0.1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERA-6AEB2613V |
| R8 | 10 kΩ SMD-Widerstand, 0.1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERA-6AEB103V |
| R10, R11, R15, R22 | 4.75 kΩ SMD-Widerstände, 1%, 1/10 W, 0402, AEC-Q200 | Panasonic | ERJ-2RKF4751X |
| R13, R18 | 10 kΩ SMD-Widerstände, 1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERJ-6ENF1002V |
| R14 | 20 kΩ SMD-Widerstand, 1%, 1/8 W, 0805, AEC-Q200 | Panasonic | ERJ-6ENF2002V |
| R23, R24 | 10 kΩ SMD-Widerstände, 5%, 1/10 W, 0603, AEC-Q200 | Panasonic | ERJ-3GEYJ103V |
| R32 | 0.1 Ω SMD-Widerstand, 1%, 1/6 W, 0402, AEC-Q200 | Panasonic | ERJ-2BSFR10X |
| R38, R39 | 1 MΩ SMD-Widerstände, 1%, 1/10 W, 0603, AEC-Q200 | Panasonic | ERJ-3EKF1004V |
| U1 | Echter Power-On-Multiturn-Sensor | Analoge Geräte | ADMT4000BRUZAB |
| U2 | IC 32 kBIT serielles EEPROM | Mikrochip-Technologie | 24AA32A-I/SN |
| U3 | 5 V, 3 A logikgesteuerter High-Side-Leistungsschalter | Analoge Geräte | ADP196ACPZN-R7 |
| U4 | 3 MHz Aufwärts-DC/DC-Wandler mit integriertem Schottky in dünnem SOT | Analog Devices L | LT3461AES6#TRMPBF |
| U5 | IC-Expander, serielle Peripherieschnittstelle (SPI), Allzweck-Ein- und -Ausgang (GPIO), 8 Bit | Mikrochip-Technologie | MCP23S08T-E/SS |
| U6 | CMOS, niedrige Lautstärketage, SPI/QSPI/Microwire-kompatibel Schnittstelle, seriell gesteuert, oktale SPST-Schalter |
Analoge Geräte | ADG714BCPZ-REEL7 |
![]() ESD-Vorsicht
ESD-Vorsicht
ESD-empfindliches Gerät (elektrostatische Entladung). Geladene Geräte und Leiterplatten können sich unbemerkt entladen. Obwohl dieses Produkt über patentierte oder proprietäre Schutzschaltungen verfügt, können Geräte, die hochenergetischer elektrostatischer Entladung ausgesetzt sind, beschädigt werden. Daher sollten geeignete ESD-Vorsichtsmaßnahmen getroffen werden, um Leistungseinbußen oder Funktionsverluste zu vermeiden.
Rechtliche Geschäftsbedingungen
Indem Sie die hierin besprochene Evaluierungsplatine (zusammen mit allen Werkzeugen, Komponentendokumentationen und Supportmaterialien die „Evaluierungsplatine“) verwenden, erklären Sie sich mit den unten aufgeführten Geschäftsbedingungen („Vereinbarung“) einverstanden, es sei denn, Sie haben die Evaluierungsplatine erworben. In diesem Fall gelten die Allgemeinen Verkaufsbedingungen von Analog Devices. Verwenden Sie das Evaluation Board nicht, bevor Sie die Vereinbarung gelesen und ihr zugestimmt haben. Durch die Nutzung des Evaluation Boards akzeptieren Sie die Vereinbarung. Diese Vereinbarung wird zwischen Ihnen („Kunde“) und Analog Devices, Inc. geschlossen. („ADI“), mit Hauptgeschäftssitz in Vorbehaltlich der Bedingungen der Vereinbarung gewährt ADI dem Kunden hiermit eine kostenlose, begrenzte, persönliche, vorübergehende, nicht exklusive, nicht unterlizenzierbare, nicht übertragbare Lizenz zur Nutzung des Evaluation Boards AUSSCHLIESSLICH FÜR EVALUIERUNGSZWECKE. Der Kunde versteht und akzeptiert, dass das Evaluation Board nur für den oben genannten Zweck bereitgestellt wird, und erklärt sich damit einverstanden, das Evaluation Board nicht für andere Zwecke zu verwenden. Darüber hinaus unterliegt die gewährte Lizenz ausdrücklich den folgenden zusätzlichen Beschränkungen: Der Kunde darf (i) das Evaluation Board nicht vermieten, verleasen, anzeigen, verkaufen, übertragen, abtreten, unterlizenzieren oder verteilen und (ii) Dritten keinen Zugriff auf das Evaluation Board gestatten. Der hier verwendete Begriff „Dritte“ umfasst alle juristischen Personen außer ADI, dem Kunden, deren Mitarbeitern, Tochterunternehmen und internen Beratern. Das Evaluation Board wird NICHT an den Kunden verkauft; alle hierin nicht ausdrücklich gewährten Rechte, einschließlich des Eigentums am Evaluation Board, bleiben ADI vorbehalten. VERTRAULICHKEIT. Diese Vereinbarung und das Bewertungsgremium gelten als vertrauliche und geschützte Informationen von ADI. Dem Kunden ist es untersagt, Teile des Evaluation Boards aus irgendeinem Grund an Dritte weiterzugeben oder zu übertragen. Bei Einstellung der Nutzung des Evaluation Boards oder Kündigung dieser Vereinbarung verpflichtet sich der Kunde, das Evaluation Board unverzüglich an ADI zurückzugeben. ZUSÄTZLICHE EINSCHRÄNKUNGEN. Dem Kunden ist es nicht gestattet, Chips auf der Evaluierungsplatine zu zerlegen, zu dekompilieren oder zurückzuentwickeln. Der Kunde informiert ADI über sämtliche aufgetretenen Schäden oder an der Evaluierungsplatine vorgenommenen Modifikationen oder Veränderungen, einschließlich, aber nicht beschränkt auf Lötarbeiten oder andere Aktivitäten, die sich auf den Materialinhalt der Evaluierungsplatine auswirken. Änderungen am Evaluation Board müssen den geltenden Gesetzen entsprechen, insbesondere der RoHS-Richtlinie. BEENDIGUNG. ADI kann diese Vereinbarung jederzeit durch schriftliche Mitteilung an den Kunden kündigen. Der Kunde verpflichtet sich, das Evaluation Board dann an ADI zurückzugeben. HAFTUNGSBESCHRÄNKUNG. DAS HIER BEREITGESTELLTE EVALUATIONSBOARD WIRD „WIE BESEHEN“ BEREITGESTELLT UND ADI GIBT IN DIESEM ZUSAMMENHANG KEINE GARANTIEN ODER ZUSICHERUNGEN JEGLICHER ART. ADI LEHNT AUSDRÜCKLICH JEGLICHE AUSDRÜCKLICHE ODER STILLSCHWEIGENDE ZUSICHERUNGEN, BILLIGUNGEN, GARANTIEN ODER GEWÄHRLEISTUNGEN IN BEZUG AUF DAS EVALUATION BOARD AB, EINSCHLIESSLICH, ABER NICHT BESCHRÄNKT AUF DIE STILLSCHWEIGENDE GARANTIE DER MARKTGÄNGIGKEIT, DES TITEL, DER EIGNUNG FÜR EINEN BESTIMMTEN ZWECK ODER DER NICHTVERLETZUNG GEISTIGER EIGENTUMSRECHTE. ADI UND SEINE LIZENZGEBER HAFTEN IN KEINEM FALL FÜR ZUFÄLLIGE, SPEZIELLE, INDIREKTE ODER FOLGESCHÄDEN, DIE AUS DEM BESITZ ODER DER VERWENDUNG DES EVALUATION BOARDS DURCH DEN KUNDEN ENTSTEHEN, EINSCHLIESSLICH, ABER NICHT BESCHRÄNKT AUF ENTGANGENE GEWINNE, VERZÖGERUNGSKOSTEN, ARBEITSKOSTEN ODER VERLUST VON GOODWILL. DIE GESAMTHAFTUNG VON ADI AUS JEGLICHEN URSACHEN IST AUF DEN BETRAG VON EINHUNDERT US-DOLLAR (100.00 $) BESCHRÄNKT. EXPORT Der Kunde verpflichtet sich, das Evaluation Board weder direkt noch indirekt in ein anderes Land zu exportieren und alle geltenden US-Bundesgesetze und -vorschriften in Bezug auf den Export einzuhalten. GELTENDE GESETZE. Diese Vereinbarung unterliegt dem materiellen Recht des Commonwealth of Massachusetts und wird entsprechend ausgelegt (unter Ausschluss der Kollisionsnormen). Sämtliche Rechtsstreitigkeiten im Zusammenhang mit dieser Vereinbarung werden vor den Staats- oder Bundesgerichten mit Zuständigkeit im Suffolk County (Massachusetts) verhandelt, und der Kunde unterwirft sich hiermit der persönlichen Zuständigkeit und dem Gerichtsstand dieser Gerichte.
![]() ©2024 Analog Devices, Inc. Alle Rechte vorbehalten.
©2024 Analog Devices, Inc. Alle Rechte vorbehalten.
Warenzeichen und eingetragene Warenzeichen sind Eigentum ihrer jeweiligen Inhaber.
One Analog Way, Wilmington, MA 01887-2356, USA
Dokumente / Ressourcen
 |
ANALOG DEVICES ADMT4000 True Power On Multi-Turn-Positionssensor [pdf] Benutzerhandbuch ADMT4000 True Power On Multi Turn Positionssensor, ADMT4000, True Power On Multi Turn Positionssensor, Power On Multi Turn Positionssensor, On Multi Turn Positionssensor, Multi Turn Positionssensor, Positionssensor, Sensor |