Microbrain ITS-AX3-4 Fahrzeugerkennungssensor

Bitte lesen Sie dieses Handbuch vor der Installation sorgfältig durch. Vielen Dank, dass Sie sich für unser Barriere-Anti-Smash-Radarprodukt entschieden haben. Um sicherzustellen, dass das Radar seine optimale Leistung erbringen kann, lesen Sie dieses Benutzerhandbuch bitte sorgfältig durch und installieren und bedienen Sie es strikt gemäß dem Handbuch. Das Urheberrecht an der Hardware- und Software dieses Produkts ist gesetzlich geschützt und darf von keiner Einheit oder Einzelperson verletzt werden. Um die Qualität und Leistung weiter zu verbessern, können die Spezifikationen und das Design dieses Produkts ohne vorherige Ankündigung geändert werden. Bitte haben Sie Verständnis.
Einführung
- Der Fahrzeugerkennungsradar für Tore wurde für die Anforderungen der Ein- und Ausgangsverwaltung von beispielsweise Parkplätzen und Tiefgaragen entwickelt.
- Es kann das Heben und Senken der Torstange präzise steuern, indem es in Abstimmung mit der Hauptsteuerplatine der Tormaschine arbeitet. Gleichzeitig kann es wirksam verhindern, dass die Torstange das Ziel, das durch das Radarfeld von geht, „versehentlich verletzt“. view, wodurch ein intelligenter Schutz gegen Zerschlagen gewährleistet wird.
- Das Radar verwendet eine hochintegrierte HF-Chip-SoC-Lösung, die sich durch geringe Größe, niedrige Kosten, ganztägigen und wetterfesten Betrieb, hohe Erkennungsempfindlichkeit, hohe Genauigkeit, einfache Fehlerbehebung und Installation sowie Stabilität und Zuverlässigkeit auszeichnet.
- Die Betriebsfrequenz dieses Radars beträgt 60–64 GHz, wobei eine kontinuierliche Wellenform mit linearer Frequenzmodulation und eine Entfernungsauflösung von bis zu 4 cm verwendet wird. Die Millimeterwellenantenne verwendet eine Mehrfachübertragungs- und Mehrfachempfangsmethode mit hoher Winkelauflösung und Winkelmessgenauigkeit.
- Durch das gemeinsame Optimierungsdesign von Software und Hardware kann dieses Produkt Fußgänger, Fahrzeuge und andere Ziele, die den Torschrankenbereich passieren, genau identifizieren und unterscheiden und Phänomene wie „Autos zerquetschen“, „Personen zerquetschen“ und „nicht fallende Schranken“ vermeiden.
Technische Spezifikationen
| Besonderheit | Parameter | Technische Indikatoren |
|
Systemeigenschaften |
Betriebslautstärketage | 9-24 V (12 V/1 A) |
| Betriebstemperatur | -40℃~+85℃ | |
| Leistung | < 0.5W | |
| Schutzstufe | IP55 | |
| Kommunikationsschnittstelle |
RS485; Bluetooth |
|
| Schalengröße | 107.6*73.3*18.3 mm | |
|
Reichweite erkennen |
Erkennungsbreite |
Die Standardeinstellung ist
±0.5 Meter und kann innerhalb angepasst werden ±1.5 Meter je nach tatsächlichen Bedingungen. |
| Erfassungsdistanz | 1–6 m (Standard: 3 m) | |
| Upgrade und Debuggen | Online-Debug | 485; Bluetooth |
| Online-Upgrade | 485; Bluetooth | |
| Anwendung | Gerade Schranke
3.Funktionen |
|
Merkmale
Das Aussehen des Radars ist in Abbildung 1 dargestellt. Seine Hauptmerkmale sind:
LED-Anzeige:
- Auf der Vorderseite des Sensors befinden sich zwei LED-Anzeigen. Die rote ist die Betriebsanzeige, die nach dem Einschalten leuchtet; die grüne ist die Statusanzeige, die aufleuchtet, wenn ein Ziel im Bereich erkannt wird, und erlischt, wenn das Ziel verschwindet.
Konfiguration des Erfassungsbereichs:
- Der Standard-Erfassungsbereich des Sensors liegt bei 3 Metern nach vorne. Über die Handy-App oder die Computer-Debugging-Software können unterschiedliche Erfassungsbereiche eingestellt werden.
Speichern der Konfigurationsparameter:
- Kann den Erkennungsbereich und andere Konfigurationen automatisch speichern und nach einem Stromausfall und Neustart die zuletzt gespeicherten Konfigurationsparameter verwenden;
Firmware-Upgrade:
- Keine Demontage und Installation erforderlich. Aktualisieren Sie die Firmware online über die 485/Bluetooth-Schnittstelle und starten Sie den Sensor nach Abschluss der Aktualisierung neu, damit sie wirksam wird.
Stabile Leistung:
- Die Funktion des Sensors wird durch äußere Einflüsse wie Licht, Staub, Regen und Schnee nicht beeinträchtigt.
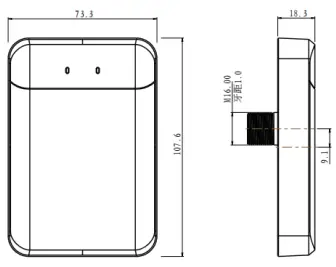
- Aussehen und Abmessungen des Fahrzeugerkennungssensors
Installationsanleitung
- Der Sensor sollte auf der Oberfläche des Schrankenkastens und senkrecht zum Boden installiert werden. Die Installation muss die folgenden Schritte befolgen:
Schritt 1: Bestätigen Sie die Position des Radarinstallationslochs
- Die Innenseite der geraden Stange befindet sich 200–300 mm von der Position des Radar-Einbaulochs entfernt, 650–750 mm vom Fahrbahnboden (nicht von der Sicherheitsinsel) (für Autos und Lieferwagen), 750–800 mm (für LKW mit einem Fahrgestell höher als 700 mm); die Einbauposition ist in Abbildung 2 dargestellt.
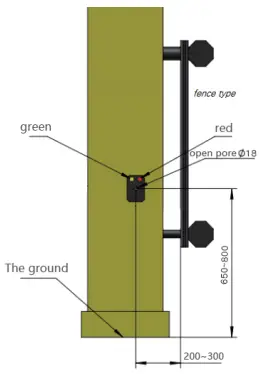
- Schematische Darstellung des Einbauortes des Sensors
Schritt 2: Montageloch
- Bohren Sie mit einer Bohrmaschine an der gewünschten Stelle des Torkastens ein Befestigungsloch passend für M16. Der empfohlene Bohrerdurchmesser beträgt 18mm.
Schritt 3: Installation und Befestigung
- Wie in der Abbildung unten gezeigt, wird das Radar mit den unteren Schrauben am Torkasten befestigt (Drehmomentwert unter 20 Nm). Setzen Sie zuerst das Radar in den Torkasten ein, decken Sie es dann mit einer Dichtung ab und ziehen Sie es mit einer M16-Schraube fest. Führen Sie dann das Ende des Kabelbaums nach unten in das Radar ein und ziehen Sie die Metallschnalle fest. Der endgültige Installationseffekt ist in Abbildung 3 dargestellt.
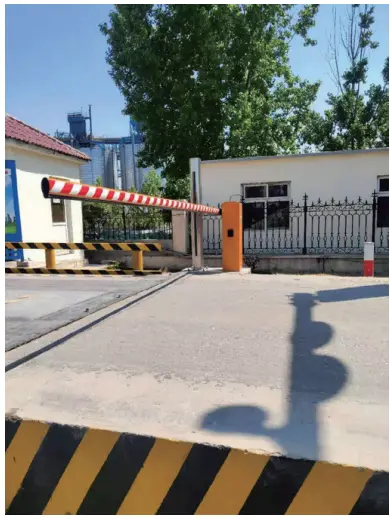
- Diagramm zur Wirkung der Installation eines Gate-Radars
Definition der Kabelschnittstelle
| NEIN | Kabel-ID | Farbe | Beschreibung |
| 1 | 12 V | Rot | Positiv |
| 2 | Masse | Schwarz | Negativ |
| 3
4 |
B-/RX
A+/TX |
Weiß
Grau |
485 B-
485 A+ |
| 5 | NO1 | Blau | Schließer1 |
| 6 | NO1 | Grün | Schließer1 |
| 7 | NC2 | Braun | Normalerweise geschlossen2 |
| 8 | NC2 | Lila | Normalerweise geschlossen2 |
Die Kabelbaumfunktionen und Anschlussbeziehungen sind wie folgt:
Stromanschluss
- Das rote Kabel „12 V“ wird an den positiven Ausgangspol der 12-V-Stromversorgung angeschlossen;
- Das schwarze Kabel „GND“ wird mit dem negativen Ausgangspol der 12-V-Stromversorgung verbunden.
Gate-Steuersignal
- Bei den grünen und blauen Kabeln handelt es sich um normalerweise offene Relaissignale, die den Erdungssensorspulenanschluss und den gemeinsamen Anschluss (ohne Unterscheidung zwischen Plus und Minus) des Torsteuerkastens verbinden.
485 Leitungsanschluss
- Das graue Kabel wird mit dem T/R+-Ende der 485-Leitung verbunden; das weiße Kabel wird mit dem T/R--Ende der 485-Leitung verbunden.
Bluetooth-Verbindung
- Bluetooth-Name: „Radar…“ oder „Mbit…“; Benutzerpasswort: 88888888.
Konfigurationsanweisungen
- Der Sensor kann per mobiler App oder Computersoftware konfiguriert werden.
Konfiguration der mobilen App:
- Öffnen Sie nach der Installation der mobilen Debugging-App die Software wie in Abbildung 4 gezeigt, klicken Sie auf „Gerät verbinden“, wie in Abbildung 5 gezeigt, und wählen Sie die Bluetooth-Kopplungsverbindung mit „Radar…“ aus.
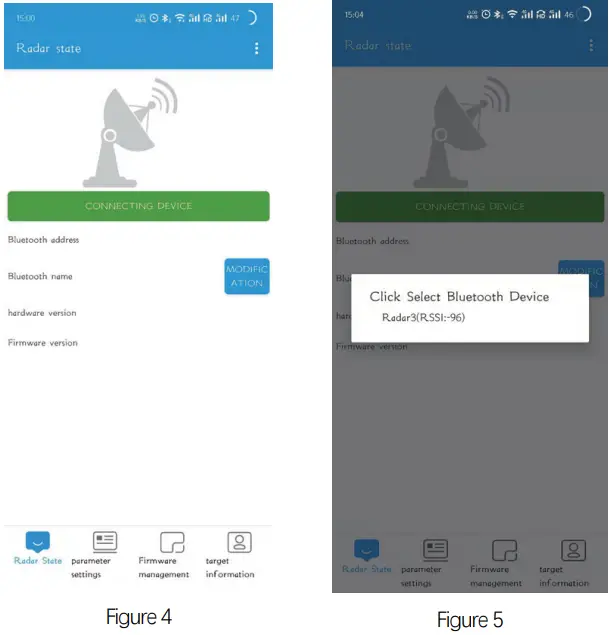
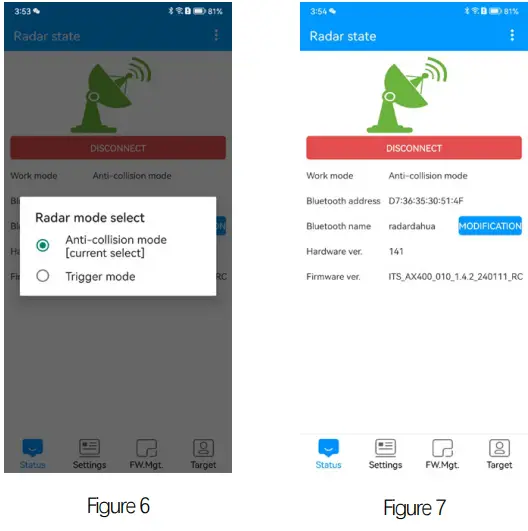
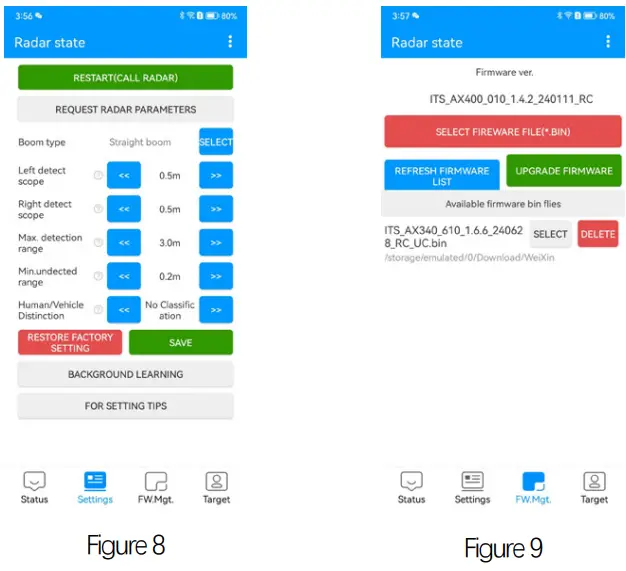
- Wählen Sie nach der Verbindung den Radarmodus, wie in Abbildung 6 gezeigt, und rufen Sie die App-Oberfläche auf, wie in Abbildung 8, Abbildung 9, Abbildung 10 und Abbildung 11 gezeigt.
- Sie können die Sensorparameter ändern und den Hintergrund entsprechend der tatsächlichen Umgebung vor Ort lernen. Um die Radar-Firmware zu aktualisieren, wählen Sie die Firmware aus, klicken Sie auf „Firmware aktualisieren“ und warten Sie, bis die Aktualisierung abgeschlossen ist.
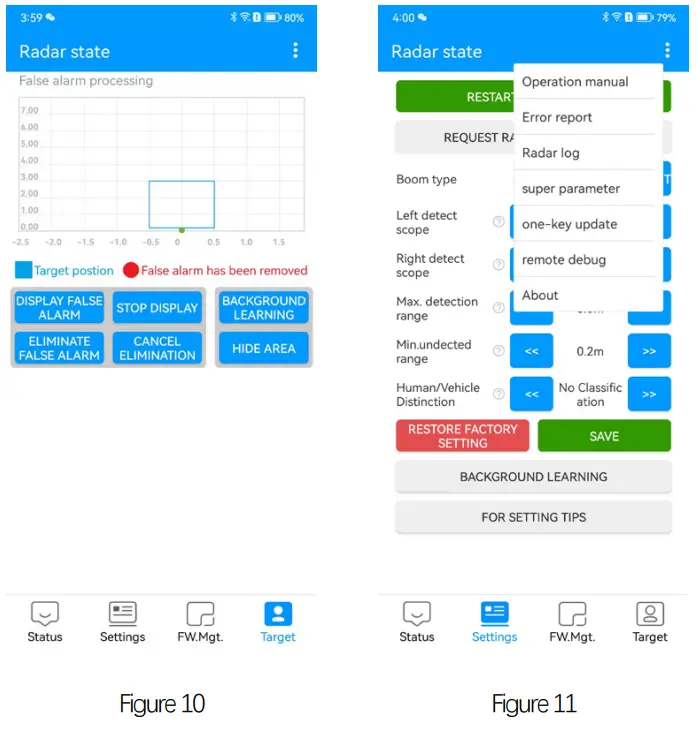
- Nach Abschluss des Hintergrundlernens können Sie auf Falschen Alarm anzeigen klicken, um view Fehlalarme. Führen Sie während der Anzeige von Fehlalarmen keine anderen Vorgänge aus, außer die Anzeige zu stoppen.
- Weitere detaillierte Informationen zur Vorgehensweise finden Sie im Produkthandbuch und im APP-Handbuch.
Anweisungen zur Fehlerbehebung bei Computersoftware
Schritt 1:
- Verbinden Sie das Radar mit dem Computer über ein USB-zu-485-Kabel. Informationen zur Radarschnittstelle finden Sie unter „5. Beschreibung der Kabelschnittstelle“.
Schritt 2:
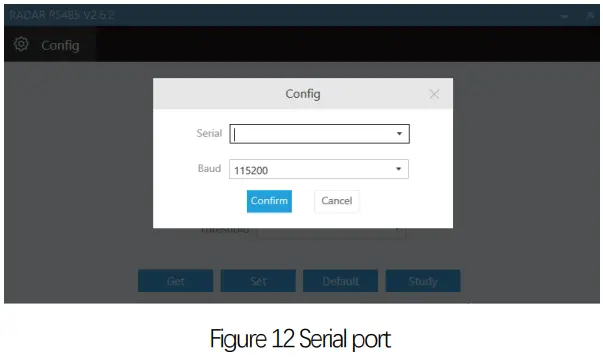
- Öffnen Sie die Debugging-Software, wählen Sie den seriellen Port und die Baudrate und klicken Sie auf „Bestätigen“.
Schritt 3:
- Durch Klicken auf die Schaltfläche „Get“ können Sie zunächst die aktuellen Einstellungsparameter des Radars abfragen.
Schritt 4:
- Tragen Sie die gewünschten Einstellparameter in die entsprechenden Optionen ein, wählen Sie „Reset“, um den Sensor zu speichern
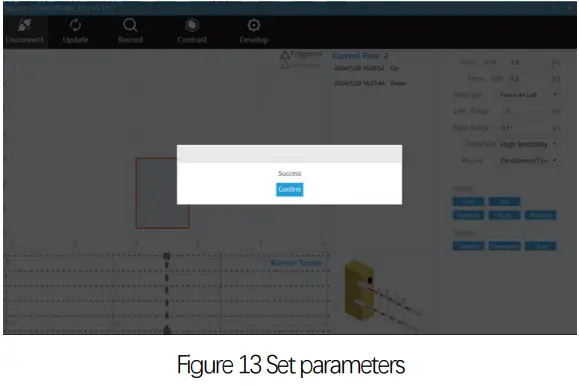
Beschreibung der Radarparameter
| Parameter Erklärung | |
|
Maximaler Frontabstand |
Der Standardwert beträgt 3 Meter und muss entsprechend der Länge des Schrankenmastes eingestellt werden. |
|
Mindestabstand vorne |
Die Standardeinstellung beträgt 0.2 Meter. Dies ist die Nichterkennungsreichweite des Radars im Nahbereich und kann je nach Standortbedingungen angepasst werden. |
| Linker Bereich | Die Standardeinstellung beträgt ±0.5 Meter und die gerade Stange kann je nach tatsächlichen Bedingungen im Bereich von ±1.5 Metern angepasst werden. |
| Richtige Reichweite | |
|
Barrierentyp |
Der Standardbarrieretyp ist „gerader Arm“ |
|
Protokoll |
Notieren Sie den Status des Sensorrelais, wenn das Fahrzeug vorbeifährt |
- Klicken Sie auf „Zurücksetzen“, um die neuen Einstellungsparameter nach dem Neustart des Radars wirksam zu machen.
- Klicken Sie auf „Get“, um die aktuelle Radarkonfiguration abzurufen.
- Klicken Sie auf „Werkseinstellungen“, um die Standardkonfiguration des Radars wiederherzustellen.
Schritt 5:
- Klicken Sie nach Abschluss der Einstellungen auf „Selbstlernen“, um den Umgebungshintergrund zu lernen und aufzuzeichnen. Starten Sie das Radar nach Abschluss des Vorgangs neu, damit die Änderungen wirksam werden.
- Stellen Sie bei Schranken mit gerader Stange sicher, dass sich keine beweglichen Ziele im Radar-Erkennungsbereich befinden, heben Sie die gerade Stange an und klicken Sie dann auf „Selbstlernen“.
- Warten Sie 6 Sekunden und starten Sie das Radar neu. Die Schnittstelle während des Lernens ist wie folgt:
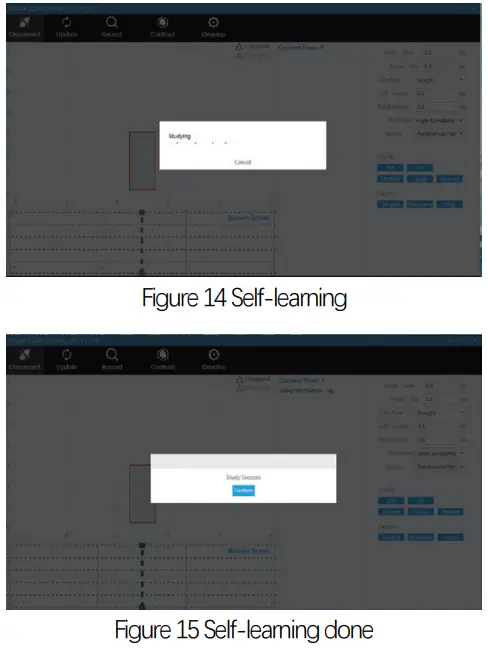
- Nachdem der Lernvorgang abgeschlossen ist, klicken Sie bitte auf die Schaltfläche „Soft-Restart“, um den Sensor neu zu starten.
Hinweise:
- Stellen Sie während des „Selbstlernens“ sicher, dass sich keine beweglichen Ziele im Sensorerkennungsbereich befinden. Wenn während des Lernvorgangs und der Aufzeichnung des Umgebungshintergrunds ein Ziel in den Sensorerkennungsbereich eintritt oder diesen durchquert, muss der Sensor neu gestartet und neu gelernt werden.
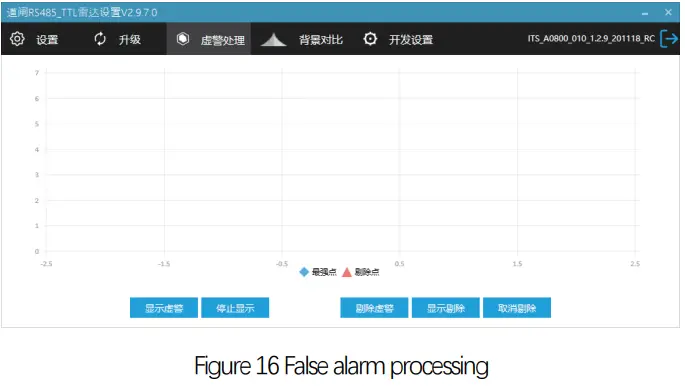
Schritt 6: Sensorstörungen prüfen
Beim ersten Debuggen des Sensors können Sie nach Abschluss des Umgebungslernens mit dieser Funktion überprüfen, ob sich vor dem Sensor Störungen befinden.
- Öffnen Sie die Debugging-Software.
- Wählen Sie „Behandlung von Fehlalarmen“.
- Klicken Sie auf „Fehlalarm anzeigen“, um view Zielinformationen.
- Klicken Sie auf „Falscher Alarm entfernen“, um Störungen durch Fehlalarme zu beseitigen.
- Wenn sich innerhalb der Erfassungsreichweite des Sticks keine Zielstörungen befinden, kann das Radar normal verwendet werden.
Vorsichtsmaßnahmen
- Die Stromversorgungsspannungtage ist stabil, um die Leistung des Radars nicht zu beeinträchtigen. Es wird empfohlen, zur Stromversorgung ein separates externes 12V/1A-Netzteil zu verwenden.
- Die Radarantenne ist im Inneren integriert. Wenn die Radaroberfläche mit Fremdkörpern (wie Wassertropfen, Frost, Regen, Schnee, Staub usw.) bedeckt ist, die den normalen Betrieb des Radars beeinträchtigen, sollte sie rechtzeitig gereinigt werden.
- Nach Änderungen der Erkennungsumgebung (z. B. durch Anbringen von Leitsäulen, Eistüten etc. im Erkennungsbereich) bitte die Umgebung neu erlernen und aufzeichnen.
- Das Erfassungsfeld des Radars view Es dürfen sich keine Objekte befinden, die die Zielerkennung beeinträchtigen (wie etwa Metallzäune, Werbetafeln, Kennzeichenerkennungskameras, Wände usw.), um Störungen des Radars zu vermeiden.
- Von der Verwendung des Radars in einkanaligen Mixed-In- und Mixed-Out-Szenarien mit installierten Zäunen und Plakatwandmasten wird abgeraten.
- In Szenarien mit Sattelaufliegern, Zementtankern usw. mit einem Karosserieabstand von mehr als 1 Meter wird die Verwendung einer Dual-Radar-Installationslösung oder einer Fernsteuerung der Torstange empfohlen.
- Der Einsatz dieses Produkts auf schlammigen Straßen wird nicht empfohlen. Extreme Wetterbedingungen (starker Regen, starker Schneefall) können die Stabilität der Radarleistung beeinträchtigen.
- Stellen Sie die Erfassungsentfernung grundsätzlich entsprechend der Länge der Stange ein. Die Erfassungsentfernung sollte etwas kleiner oder gleich der Länge der Stange sein, um zu verhindern, dass Personen oder Objekte außerhalb des Tors hindurchgehen und vom Radar erfasst werden.
- Beim Lernen und Aufzeichnen der Umgebung kann die gerade Stange wackeln, wenn sie nach dem Fallenlassen auf den Boden fällt. Warten Sie, bis die Stange völlig stabil ist, bevor Sie nachfolgende Vorgänge durchführen.
- Wenn es einen durch das Radar verursachten Rückprallpol gibt, lernen Sie den Hintergrund erneut.
- Wenn sich ein starkes, metallisches Streuobjekt (beispielsweise eine Eisenplatte) wie etwa eine Bremsschwelle direkt vor dem Radar befindet, beträgt die Radarinstallationshöhe 750–800 mm.
- Wenn Sie ein Radar in einer speziellen Umgebung installieren müssen, wenden Sie sich bitte zuerst an unser Unternehmen und installieren Sie es dann ordnungsgemäß gemäß den Vorschlägen.
Allgemeine Fehlerbeschreibung
- Fehlerphänomen: Nach der Installation leuchtet das grüne Licht des Radars immer und die Stange fällt nicht um.
- Mögliche Ursache: Es gibt einen neuen verbesserten Reflektor innerhalb der Radarerfassungsreichweite, der aus dem Radarfeld von view oder die Hintergründe neu zu erlernen.
- Fehlerphänomen: Das grüne Licht leuchtet nicht, wenn eine Person vor dem Radar steht.
- Mögliche Ursache: Die Funktion zur Unterscheidung zwischen Mensch und Fahrzeug ist aktiviert. Nachdem das Fahrzeug das grüne Radarlicht zum Aufleuchten gebracht hat, beginnt das Radar zu erkennen, ob die Person oder das Fahrzeug unterschieden wird.
- Fehlerphänomen: Nachdem das Radar an die 12-V-Stromversorgung der Torsteuerplatine angeschlossen wurde, blinkt das rote Licht und die Stromversorgung ist unzureichend.
- Mögliche Ursache: Zur Stromversorgung wird der Anschluss eines externen 12V-1A Netzteils empfohlen.
Packliste
| NEIN | Ersatzteile | Menge |
| 1 | Sensor | 1 |
| 2 | M16 Mutter | 1 |
| 3 | Dichtung | 1 |
| 4 | Kabelbaum | 1 |
| 5 | Zertifikat | 1 |
| 6 | Bedienungsanleitung | 1 |
FCC-Erklärung
Jegliche Änderungen oder Modifikationen, die nicht ausdrücklich von der für die Einhaltung verantwortlichen Partei genehmigt wurden, können zum Erlöschen der Berechtigung des Benutzers zum Betrieb des Geräts führen. Dieses Gerät entspricht Teil 15 der FCC-Bestimmungen. Der Betrieb unterliegt den folgenden beiden Bedingungen:
- Dieses Gerät darf keine schädlichen Störungen verursachen und
- Dieses Gerät muss alle empfangenen Störungen tolerieren, einschließlich Störungen, die einen unerwünschten Betrieb verursachen können.
FCC-Erklärung zur Strahlenbelastung:
- Dieses Gerät entspricht den von der FCC festgelegten Strahlenbelastungsgrenzwerten für eine unkontrollierte Umgebung. Dieser Sender darf nicht am selben Standort wie eine andere Antenne oder ein anderer Sender aufgestellt oder zusammen mit diesen betrieben werden. Beim Installieren und Betrieb dieses Geräts muss ein Mindestabstand von 20 cm zwischen dem Strahler und Ihrem Körper eingehalten werden.
Notiz :
- Dieses Gerät wurde getestet und entspricht den Grenzwerten für ein digitales Gerät der Klasse B gemäß Teil 15 der FCC-Bestimmungen.
- Diese Grenzwerte sollen einen angemessenen Schutz gegen schädliche Störungen bei der Installation in Wohngebieten bieten.
- Dieses Gerät erzeugt und verwendet Hochfrequenzenergie und kann diese ausstrahlen. Wenn es nicht gemäß den Anweisungen installiert und verwendet wird, kann es schädliche Störungen der Funkkommunikation verursachen.
- Es besteht jedoch keine Garantie dafür, dass bei einer bestimmten Installation keine Störungen auftreten.
- Wenn dieses Gerät Störungen beim Radio- oder Fernsehempfang verursacht (was durch Ein- und Ausschalten des Geräts festgestellt werden kann), wird dem Benutzer empfohlen, die Störungen durch eine oder mehrere der folgenden Maßnahmen zu beheben:
- Empfangsantenne neu ausrichten oder verlegen.
- Vergrößern Sie den Abstand zwischen Gerät und Empfänger.
- Schließen Sie das Gerät an eine Steckdose an, die zu einem anderen Stromkreis gehört als der Empfänger.
- Wenden Sie sich an Ihren Händler oder einen erfahrenen Radio-/Fernsehtechniker.
Häufig gestellte Fragen
F: Kann der Erfassungsbereich angepasst werden?
A: Ja, der Erkennungsbereich kann über die mobile App oder Computersoftware angepasst werden.
F: Wie aktualisiere ich die Firmware?
A: Die Firmware kann online über die 485/Bluetooth-Schnittstelle ohne Demontage aktualisiert werden.
Dokumente / Ressourcen
 |
Microbrain ITS-AX3-4 Fahrzeugerkennungssensor [pdf] Benutzerhandbuch ITS-AXX-XX, ITS-AX3-4 Fahrzeugerkennungssensor, ITS-AX3-4, Fahrzeugerkennungssensor, Erkennungssensor, Sensor |